
|
Projet 4: MOTORISATION DES AIGUILLAGES (terminé) La motorisation des aiguillages est un casse tête pour tous les modélistes. En effet, la fiabilité des moteurs à solénoïde fournis par les fabricants d'aiguillages laisse parfois à désirer. Il existe plein de motorisations dans le commerce, leur intégration n'est pas toujours évidente et leur pilotage pas toujours simple. Fabriquant mes propres décodeurs sur une base d'Arduino Nano, le pilotage de servomoteurs s'imposa d'office car notre Nano peut directement envoyer les ordres de positionnement d'un servomoteur sans composant intermédiaire. Sachant que le servomoteur que j'ai choisi coûte 1,15 Euros, la décision est vite prise. L'avantage de cette solution, est que la position droite comme la position déviée peuvent être programmées séparément et avec une excellente précision.
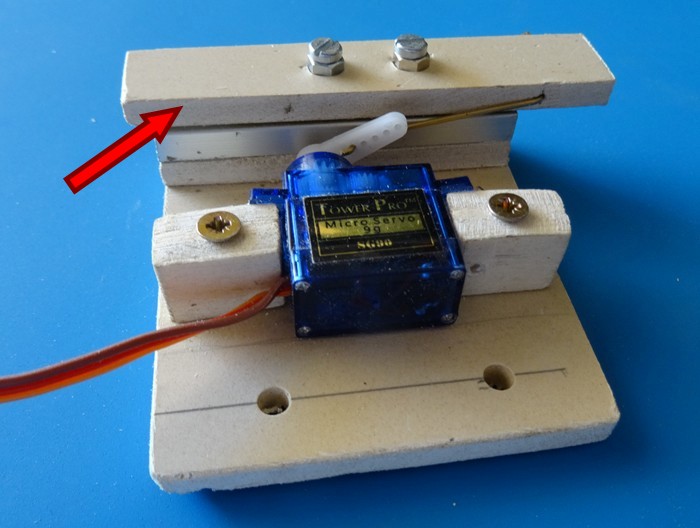
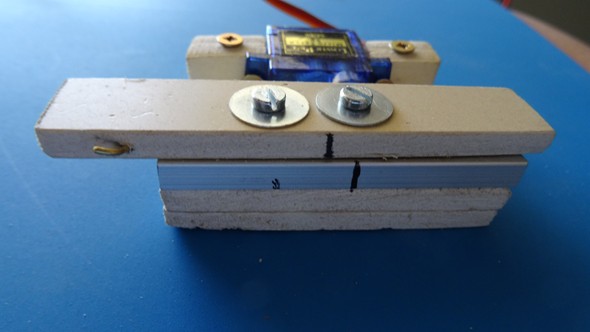
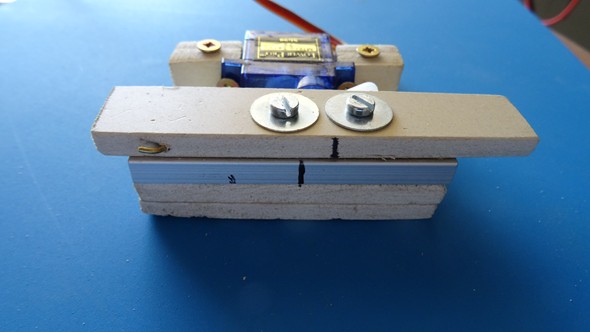
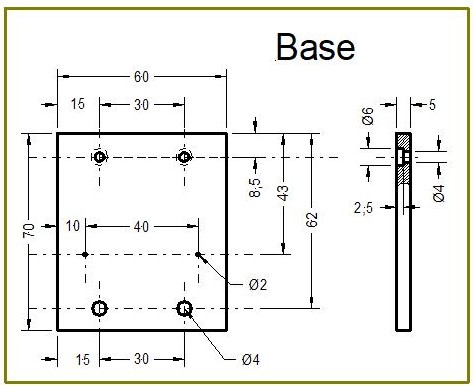
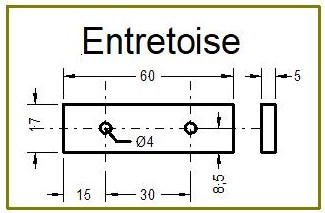
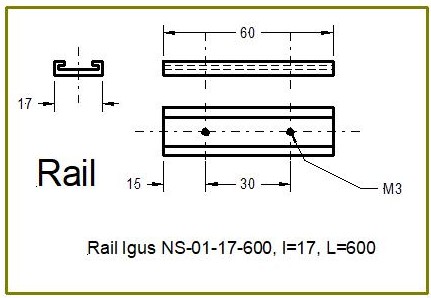
La seule chose qu'il reste à faire c'est un module mécanique qui transforme le mouvement de rotation du moteur en mouvement linéaire utilisable par l'aiguillage. Ainsi nous obtiendrons une fonction complète (0,2 décodeur maison + 1 servomoteur SG90 + 1 support) pour un coût dérisoire de 8,70 Euros contre 33,96 Euros pour la même fonction du commerce (0,17 décodeur Lenz LS 150 + 1 servo Conrad + 1 support) . Diviser par 4 le coût de la commande des aiguillages, c'est pas mal.
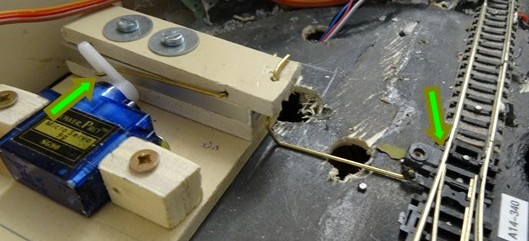
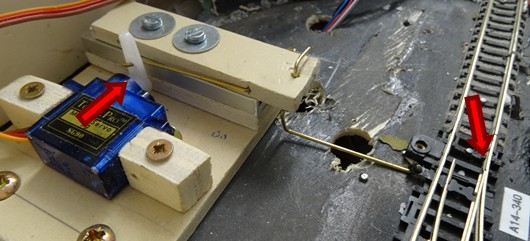
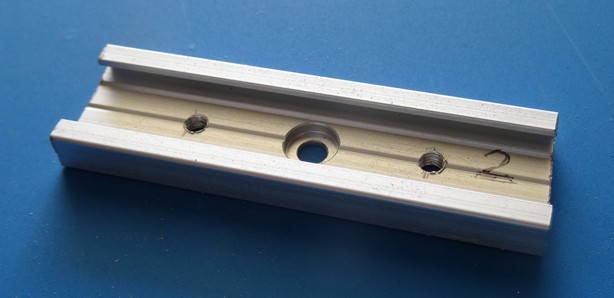
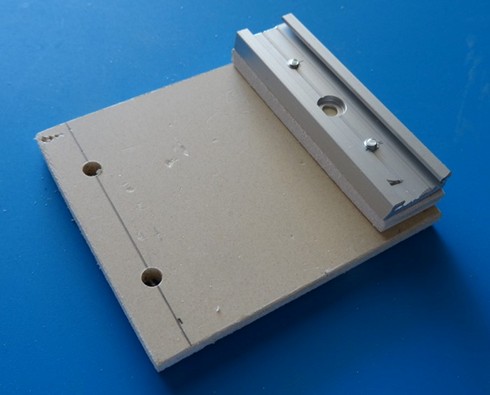
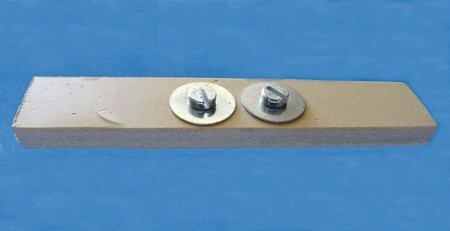
Les 2 photos ci-dessous montrent la course du balladeur, celle-ci peut être ajustée au moyen d'un paramètre dans le programme du module Arduino.
|